
SMG Technology provides perfect overhaul service with the self-developed test kit and wide experience on robotics and core drivers.
Robot – Repair / Refurbish Service Introduction
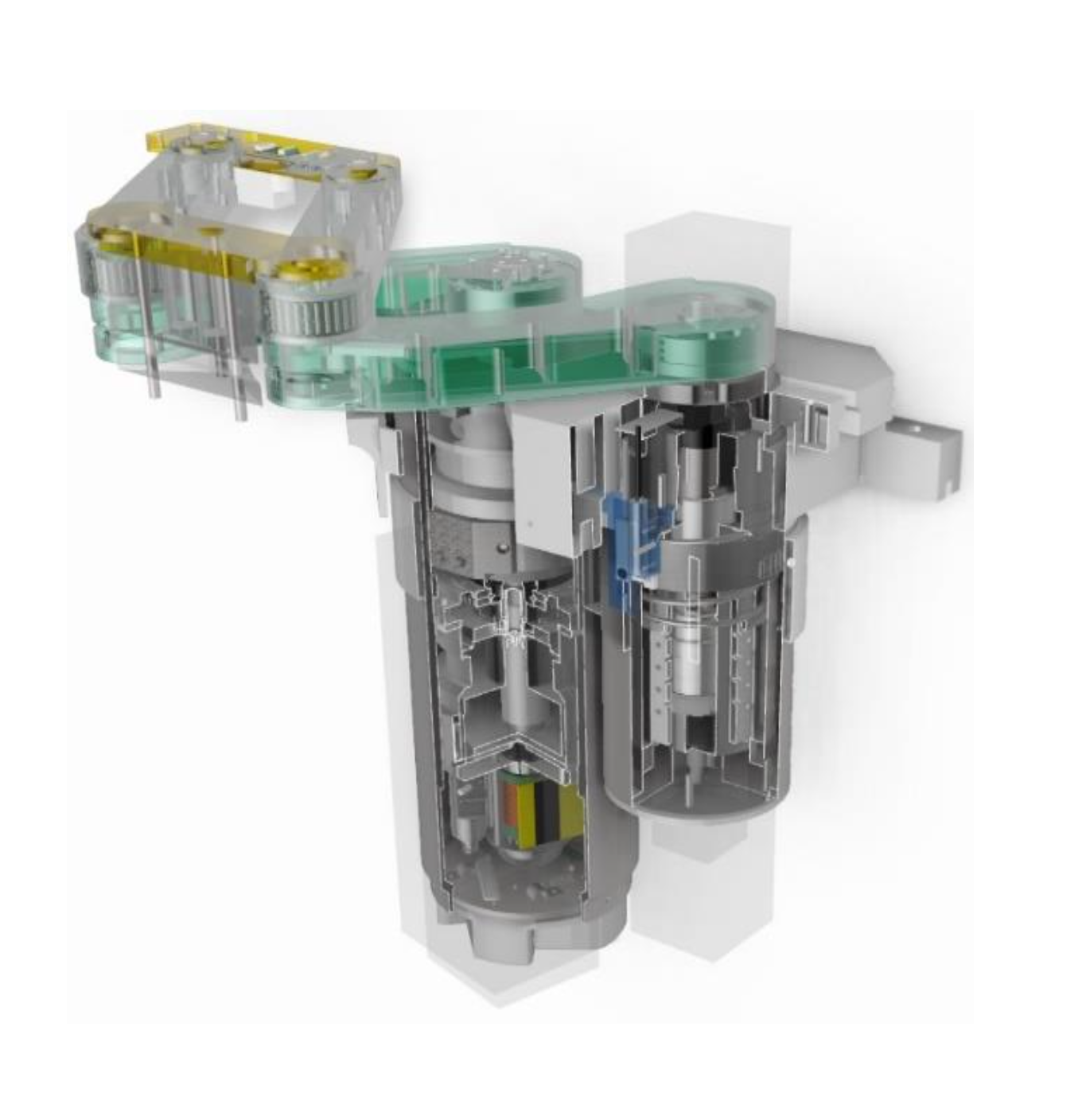
With years of experience for key driving part and robots, we providing full overhaul service for robot and driving part with SMG Technology own developed test kit.
- Home
- Robot – Repair / Refurbish Service Introduction
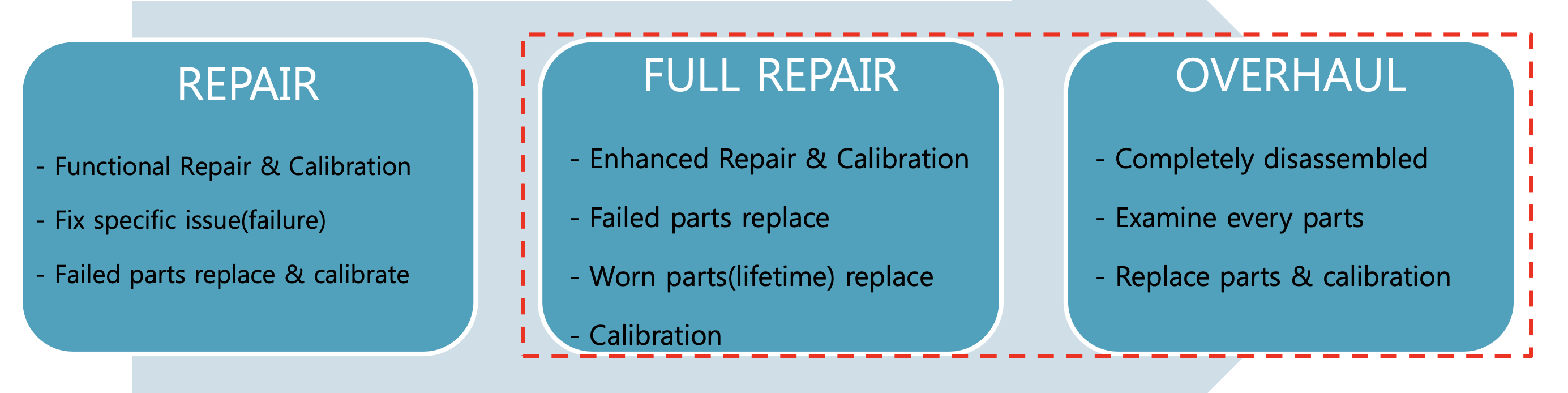
1. Robot Repair Level
A. Working Levels
Full Process
TEST:
- SMG build up test kit for each robot to confirm functionality of each robot
INSPECTION:
- Not only typical inspection method, SMG developed own inspection system from numerous repair experiences
- Not only functionality but also robot condition checked by inspection kit
- SMG build up test kit for each robot to confirm functionality of each robot
INSPECTION:
- Not only typical inspection method, SMG developed own inspection system from numerous repair experiences
- Not only functionality but also robot condition checked by inspection kit
2. Robot Repair Process
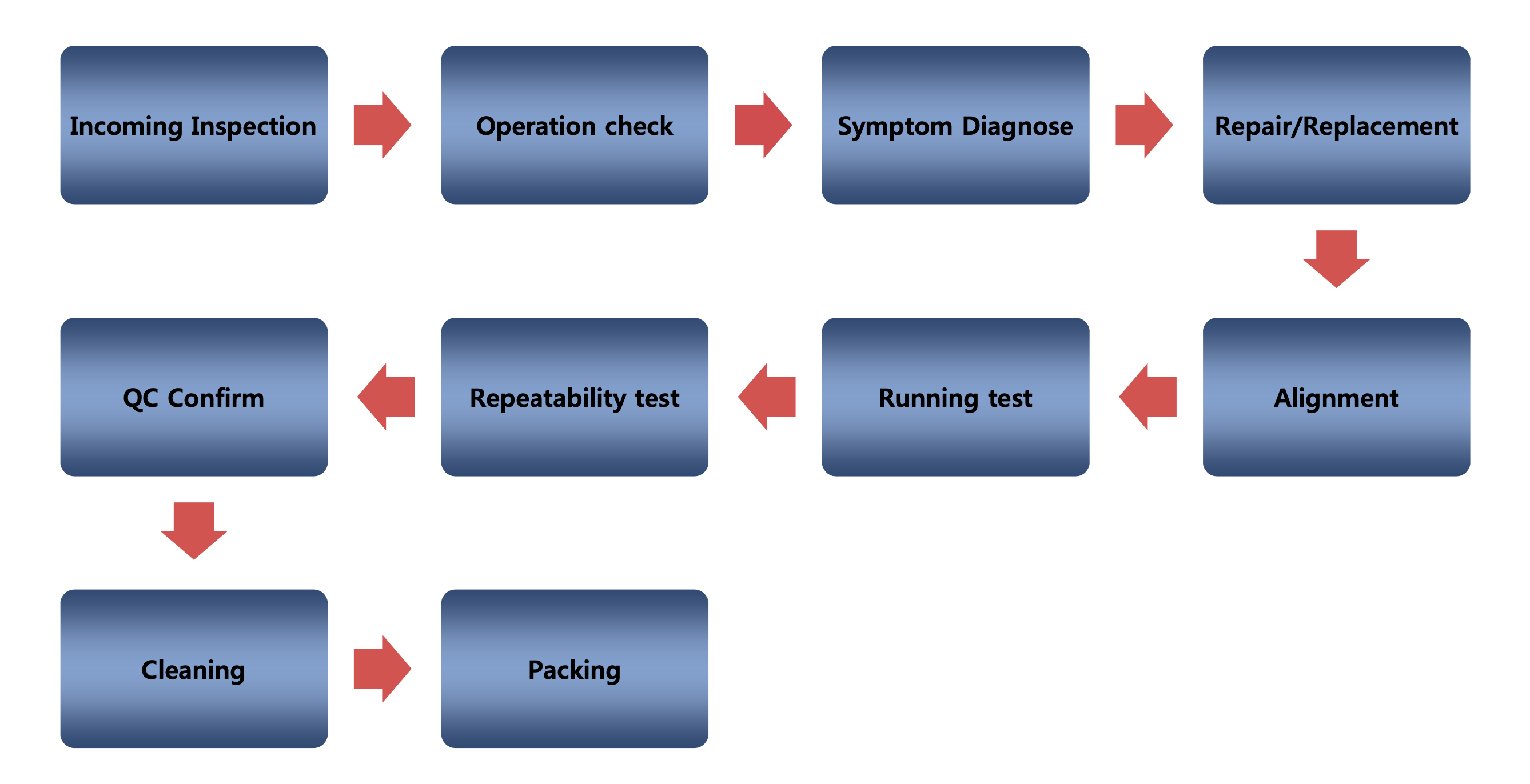
All repair following our standard repair process steps to make sure 100% quality.
Incoming Inspection Report will be provided within 3 days from incoming date.
If there is any specific event during repair process, SMG team will officially report without delay
Incoming Inspection Report will be provided within 3 days from incoming date.
If there is any specific event during repair process, SMG team will officially report without delay
| Brand | Model | Tool Type | Repair | Overhaul |
|---|---|---|---|---|
| Canon | ES3 Scanner Wafer Transfer Robot | PG-CR-B0D1 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-100 | ◎ | ◎ | |
| Brooks-PRI Robot | ATM-105 | KLA_OP2000 ; Thermawave ; August 量測機台 Rudolph | ◎ | ◎ |
| Brooks-PRI Robot | ATM-107 | KLA_Tencor 量測機台 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-107B | ASTI_Sorter | ◎ | ◎ |
| Brooks-PRI Robot | WTM-107B | IPEC_CMP_776 R1&2 and Momentum_R2 | ◎ | ◎ |
| Brooks-PRI Robot | WTM-107EGW | IPEC_CMP_Momentum_R1 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-204 | LAM_Autoload | ◎ | ◎ |
| Brooks-PRI Robot | ATM-205 | KLA_Quantox XP | ◎ | ◎ |
| Brooks-PRI Robot | ABM-205 | IPEC_CMP_776 and Momentum_R3 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-207 | KLA_Tencor 量測機台 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-305 | Mattson AST-2800 | ◎ | ◎ |
| Brooks-PRI Robot | ATM-307 | Mattson RTP | ◎ | ◎ |
| Brooks-PRI Robot | ATM-405 | KLA_量測機台 | ◎ | ◎ |
| Brooks-PRI Robot | ABM-405 | AMAT_Producer ; AMAT_Quantum; OP | ◎ | ◎ |
| Brooks-PRI Robot | ATM-407 | KLA_Surfscan, AMAT Producer | ◎ | ◎ |
| Brooks-PRI Robot | ABM-407 | Rudolph_量測機台 | ◎ | ◎ |
| Brooks-PRI Robot | ABM-407B | KLA_量測機台 | ◎ | ◎ |
| Brooks-PRI Robot | VAC-407-2A | Varian VIISta 810 (Implant) | ◎ | ◎ |
| Brooks-PRI Robot | DBM-2406, DBM-2407 DBM-2706 | SEZ SP4300, Varian VIISta, FSI ANTARES DBM-2706(Implant) | ◎ | ◎ |
| Brooks-PRI Robot | WTM-511 | AMAT-CMP wet (AMTCMP) | ◎ | ◎ |
| Brooks-PRI Pre-aligner | PRE-200, 200B, 201, 201B | For 8 " Wafer | ◎ | ◎ |
| Brooks-PRIPre-aligner | PRE-300, 300B, 301, 301B | For 8" & 12 " Wafer | ◎ | ◎ |
| PRI CNTL | ESC-100 系列 | PRI Robot_Old Type | ◎ | |
| PRI CNTL | EDC-2400 | FSI, SEZ | ◎ | |
| PRI CNTL | EDC-2800 | FSI, Varian(Implant) | ◎ | |
| PRI CNTL | ESC-200, 201, 204, 212, 218, 222 | PRI Robot | ◎ | |
| Brooks | ATR-8_NVLS | Novellus_Vector, Inova XT, ECP-300mm(CVD) | ◎ | ◎ |
| Brooks | ATR-8_LAM | LAM_Etch_2300 Exelan(Etch) | ◎ | ◎ |
| Brooks | ATR-7_NVLS | Novellus_ECP-200 mm, Sabre_300mm | ◎ | ◎ |
| Brooks | ATR-7_Arm set | Novellus_ECP-200 mm, Sabre_300mm | ◎ | ◎ |
| Brooks | AQR-7 | Novellus_ECP(Process) 200mm | ◎ | ◎ |
| Brooks | AQR-7 | Novellus_ECP(Process) 300mm, Sabre_300mm | ◎ | ◎ |
| Brooks | Pre-Aligner 7391 | LAM | ◎ | ◎ |
| Brooks | AQR-7_Arm Set | Novellus_ECP(Process) | ◎ | ◎ |
| Brooks | Traverser 002-8761-05 | Novellus_CVD | ◎ | ◎ |
| Brooks | Controller | For ATR7, AQR7, ATR8 | ◎ | |
| Brooks | Robot MTR5 | Novellus | ◎ | ◎ |
| Brooks | Robot MTR5 | Lam | ◎ | ◎ |
| Brooks | Robot MTR5 Armset | Novellus | ◎ | ◎ |
| Brooks | Robot MTR5 Armset | Lam | ◎ | ◎ |
| Brooks | MAG-7 Armset | Lam_200mm | ◎ | ◎ |
| Brooks | MAG-7 Armset | Lam_300mm (Etch) | ◎ | ◎ |
| Brooks | MAG-7 Armset | Novellus_CVD _200mm | ◎ | ◎ |
| Brooks | MAG-7 Armset | Novellus_CVD _300mm | ◎ | ◎ |
| Brooks | MAG-8 | AMAT Producer_GT(CVD), Vecco, ASM, Varian | ◎ | ◎ |
| Brooks | MAG8 controller | AMAT Producer_GT(CVD), Vecco, ASM, Varian | ◎ | |
| Brooks | MAG-9 | ◎ | ◎ | |
| MAG70 | AKT | ◎ | ◎ | ◎ |
| Brooks | MAG74 | Anelva | ◎ | ◎ |
| Brooks | MAG70 Arm set 4300 | AKT 4300 | ◎ | ◎ |
| Brooks | MAG70 Arm set 5500 | AKT 5500 | ◎ | ◎ |
| Brooks | MAG74 Arm set | Anelva | ◎ | ◎ |
| Brooks | TBM | Brooks Load Port | ◎ | ◎ |
| Brooks | Razor/Controller | ◎ | ◎ | |
| Brooks | Robot MAG7 E4 | LAM 2300 | ◎ | ◎ |
| Brooks | Robot MAG-7 | Novellus_Concept 2, 3(CVD) | ◎ | ◎ |
| Brooks | Robot MAG-7 | Lam_2300(Etch) | ◎ | ◎ |
| Kensington | 3軸Robot | AMAT_CVD Producer | ◎ | ◎ |
| Kensington | 5軸Robot | AMAT_CMP FI | ◎ | ◎ |
| Kensington | ALIGNER | AMAT FI | ◎ | ◎ |
| Kensington | 3軸Controller R1 | AMAT_FI(CVD) | ◎ | |
| Kensington | 3軸Controller R2 | AMAT_FI(CVD) | ◎ | |
| Kensington | 5軸Controller | AMAT_CMP | ◎ | |
| Kawasaki | Robot 3NS410B-Axxx | AMAT_Producer SE, Producer eXT(CVD & Etch) | ◎ | ◎ |
| Kawasaki | Robot 3NS410B-Bxxx | AMAT_Producer SE, Producer eXT(CVD & Etch) | ◎ | ◎ |
| Kawasaki | Robot 3NS411B-Fxxx | AMAT_Reflexion FI(CMP) | ◎ | ◎ |
| Kawasaki | Robot 3NS411B-Gxxx | AMAT_Reflexion FI(CMP) | ◎ | ◎ |
| Kawasaki | Robot 3NS511C-Fxxx | AMAT_Reflexion Wet(CMP) | ◎ | ◎ |
| Kawasaki | Robot 3NS511C-Gxxx | AMAT_Reflexion Wet(CMP) | ◎ | ◎ |
| Kawasaki | Robot 3NS420B | ASM XP4 | ◎ | ◎ |
| Kawasaki | Robot 3NS510S | Nissin | ◎ | ◎ |
| Kawasaki | Robot 3NS520S | Nissin | ◎ | ◎ |
| Kawasaki | Robot 3NX510B | AMAT_FI Producer GT(CVD) | ◎ | ◎ |
| Kawasaki | Robot 3NX520B | Thermawave Optiprobe 7341 | ◎ | ◎ |
| Kawasaki | Robot 3NX540B | AMAT_FI Producer eXT(Etch) | ◎ | ◎ |
| Kawasaki | Robot 3NX550B | KLA_FX-100(Metrology) | ◎ | ◎ |
| Kawasaki | Robot 3NT410B | AMAT Producer GT | ◎ | ◎ |
| Kawasaki | Robot 3NT420B | Rudolph_量測機台, ASM, DNS SU3200 | ◎ | ◎ |
| Kawasaki | Robot 3NT510B | LAM 2300 | ◎ | ◎ |
| Kawasaki | Robot 3NT520B | ◎ | ◎ | |
| Kawasaki | Robot 3NT570C | AMAT Producer GT | ◎ | ◎ |
| Kawasaki | Robot 3TX210B | AMAT FI | ◎ | ◎ |
| Kawasaki | Robot Controller C61C Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller C61D Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller C61E Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller 30C61C Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller 30C61D Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller 30C61E Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller 30C60F Repair | Kawasaki C type Controller | ◎ | |
| Kawasaki | Robot Controller 30C63E Repair | Kawasaki C type Controller/SB920 Robot | ◎ | |
| Kawasaki | Robot Controller 30C65E Repair | AMAT_FI | ◎ | |
| Kawasaki | Robot Controller 30C67E Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30C65F Repair | KLA Metrology Robot controller | ◎ | |
| Kawasaki | Robot Controller 30D61E Repair | AMAT Robot controller | ◎ | |
| Kawasaki | Robot Controller 30D61H Repair | AMAT Robot controller | ◎ | |
| Kawasaki | Robot Controller 30D61I Repair | AMAT_LK Reflexion Controller / NS511C + NS41 | B ◎ | |
| Kawasaki | Robot Controller 30D60G Repair | ◎ | ||
| Kawasaki | Robot Controller 30D60E Repair | Kawasaki D type Controller/NT510B with Aligner | ◎ | |
| Kawasaki | Robot Controller 30D63E Repair | Kawasaki D type Controller/SB922 Robot | ◎ | |
| Kawasaki | Robot Controller 30D60F Repair | Kawasaki D type Controller/NT520B, TT210 Robot | ◎ | |
| Kawasaki | Robot Controller 30D63F Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D65F Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D65I Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D61K Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D65K Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D60H Repair | Kawasaki D type Controller | ◎ | |
| Kawasaki | Robot Controller 30D66D Repair | Kawasaki D type Controller/RD920 Robot | ◎ | |
| Kawasaki | Robot Controller 30D66E Repair | Kawasaki D type Controller/SS910 Robot | ◎ | |
| Kawasaki | Robot Controller 30C08H Repair | DNS SS3000 Controller | ◎ | |
| Kawasaki | Pre-Aligner | AMAT_FI Centura | ◎ | ◎ |
| Kawasaki | Aligner NS001S-L006 | Work with NT520B/30D60F | ◎ | ◎ |
| Kawasaki | Aligner_NS004S-C005 | ◎ | ◎ | |
| Kawasaki | TS220 MHU | DNS SS3000 | ◎ | ◎ |
| Kawasaki | TS310IHU | DNS SS3000 | ◎ | ◎ |
| Kawasaki | TS520 BHU | DNS SK 2000 | ◎ | ◎ |
| Kawasaki | SS621/SS621/SL922 | DNS Tool | ◎ | ◎ |
| Kawasaki | SS610/611/920/921 Arm | DNS Tool | ◎ | ◎ |
| Kawasaki | FC-3100 Arm | DNS_FC-3100 | ◎ | ◎ |
| Kawasaki | TS/520/310/220 Arm | DNS_Aquaspin SS3000 | ◎ | ◎ |
| Yaskawa | Robot XU-RCM6420 | AMAT_ECP Slimcell | ◎ | ◎ |
| Yaskawa | Robot XU-RCM6422 | AMAT_ECP Slimcell | ◎ | ◎ |
| Yaskawa | Robot XU-RCM6841 | AMAT_FI for DPN Endura | ◎ | ◎ |
| Yaskawa | Robot XU-RCM6801 | AMAT_FI for DPN Endura | ◎ | ◎ |
| Yaskawa | Robot XU-RCM6802 | AMAT_FI for DPN Endura | ◎ | ◎ |
| Yaskawa | Robot XU-RCM7230 | AMAT_FI for Vantage | ◎ | ◎ |
| Yaskawa | Robot XU-RCM7231 | AMAT_FI for Vantage | ◎ | ◎ |
| Yaskawa | Robot XU-RCM7410 | Axcelis IHEI 701(Implant) | ◎ | ◎ |
| Yaskawa | Robot XU-RCM8100 | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RC400M | AMAT, Rudolph August-AXI-930 | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-J03 | Varian Implant | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-C03 | Rudolph | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-K01 | DNS SU3000 | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-B23 | SpeedFam EP-300X | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-I01 | Ebara FREX300S | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-1C06 | AMAT | ◎ | ◎ |
| Yaskawa | Robot XU-RC350D-1B06 | AMAT Vantage | ◎ | ◎ |
| Yaskawa | Robot XU-RC350S-J01 | AMAT Producer | ◎ | ◎ |
| Yaskawa | Robot XU-RC595S | ◎ | ◎ | |
| Yaskawa | Robot XU-RC845M | TEL Vigus | ◎ | ◎ |
| Yaskawa | Robot XU-RC870M | ◎ | ◎ | |
| Yaskawa | Robot XU-RCM4900 | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM4901 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RSM4800 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM4700 | PEP3510 | ◎ | ◎ |
| Yaskawa | Controller, Yaskawa 4700 | PEP3510 | ◎ | |
| Yaskawa | Robot XU-RCM53B0 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Ebara CMP Wet Robot | ◎ | ◎ | |
| Yaskawa | Robot XU-RCM53E0A | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM5301 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Robot DVM4100 | ◎ | ◎ | |
| Yaskawa | Robot XU-RCM5300 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM5301A | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RSM53D0 | Ebara CMP FREX300X Wet Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RSM5330 | Ebara CMP Wet Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM9120 | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM9205 | KLA Metrology | ◎ | ◎ |
| Yaskawa | Robot XU-RCM9206 | KLA Metrology | ◎ | ◎ |
| AMAT | VHP | AMAT Vacuum Robot | ◎ | ◎ |
| AMAT | XP | AMAT Vacuum Robot | ◎ | ◎ |
| AMAT | XP Arm | AMAT Vacuum Robot | ◎ | ◎ |
| AMAT | XP Controller | AMAT Vacuum Robot | ◎ | |
| AMAT | Mesa MF Robot | AMAT | ◎ | ◎ |
| AMAT | Mesa MF Robot Arm | AMAT | ◎ | ◎ |
| AMAT | VTM Robot Arm | AMAT | ◎ | ◎ |
| AMAT | P-5000 Robot | 0010-76051 0010-13320 0010-13321 0010-09195 | ◎ | ◎ |
| AMAT | VXP Producer Robot | ◎ | ◎ | |
| Yaskawa | Robot XU-RCM8220 | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM8250 | Ebara CMP Dry Robot | ◎ | ◎ |
| Yaskawa | Robot XU-RCM5020 | Ebara CMP Robot | ◎ | ◎ |
| Yaskawa Controller | XU-CM5500 | ◎ | ||
| Yaskawa Controller | XU-CM5510 | Ebara Robot 5020 controller | ◎ | |
| Yaskawa Controller | XU-CM6180 | Ebara Robot 53E0A controller | ◎ | |
| Yaskawa Controller | XU-CM6101 | Ebara Robot 5301 controller | ◎ | |
| Yaskawa Controller | XU-CM6310 | Ebara Robot controller | ◎ | |
| Yaskawa Controller | ERCR-NS01-B004 | AMAT, Rudolph | ◎ | |
| Yaskawa Controller | ERCR-NS01-B004-E1 | AMAT | ◎ | |
| Yaskawa | Driver, BCD2081D | AMAT FI Yaskawa 6841 Driver | ◎ | |
| Yaskawa | Driver, BCD2011C | AMAT FI Yaskawa 7231 Driver | ◎ | |
| Yaskawa | Driver, BCD3111 | AMAT FI Yaskawa Driver | ◎ | |
| Yaskawa | Driver, BCD3301 | AMAT FI Yaskawa Driver | ◎ | |
| Yaskawa | Controller, CN0240A | AMAT, FI, Yaskawa 6420 Controller | ◎ | |
| Yaskawa | Controller, CN0521 | AMAT, FI, Yaskawa 6420 Controller | ◎ | |
| Yaskawa | Controller, CN0821A | AMAT, FI, Yaskawa | ◎ | |
| Yaskawa | Controller , CN1170A | AMAT FI, Yaskawa 6841 Controller | ◎ | |
| Yaskawa | Controller , CN1112A | AMAT FI Yaskawa 7231 controller | ◎ | |
| Yaskawa | Controller , CM8310 | Ebara Dry Robot controller | ◎ | |
| Yaskawa | Controller , CM8510 | Ebara Dry Robot controller | ◎ | |
| Yaskawa | Controller , CM8910 | Ebara Dry Robot controller | ◎ | |
| Yaskawa | Robot Pre-Aligner XU-ACP4801 | AMAT_DPN | ◎ | ◎ |
| Yaskawa | Robot Pre-Aligner XU-ACP130 | ◎ | ◎ | |
| Yaskawa | Robot Pre-Aligner XU-ACP4860 | AMAT_FI for DPN | ◎ | ◎ |
| LAM | Indexer | NVLS_CVD | ◎ | ◎ |
| LAM | Vortex | NVLS_Vector | ◎ | ◎ |
| LAM | Vortex Wet | NVLS_ECP | ◎ | ◎ |
| LAM | TEBR | NVLS_PVD | ◎ | ◎ |
| LAM | Vortex Dual arm Robot | NVLS_Vector | ◎ | ◎ |
| LAM | Vortex Extreme ATM Robot | NVLS_Vector | ◎ | ◎ |
| LAM | Vortex Robot controller | NVLS_Vector | ◎ | |
| LAM | Vortex Traverser | NVLS_Vector | ◎ | ◎ |
| LAM | Servo Spindle Assy | NVLS Vector | ◎ | ◎ |
| LAM | MACH 1 | LAM Tool | ◎ | ◎ |
| LAM | MACH 4 | LAM Tool | ◎ | ◎ |
| LAM | MACH 1 Controller | LAM Tool | ◎ | |
| LAM | MACH 4 Controller | LAM Tool | ◎ | ◎ |
| LAM | EOS BE Robot | LAM Tool | ◎ | ◎ |
| LAM | EOS BE Controller | LAM Tool | ◎ | ◎ |
| LAM | EOS EFEM Robot | LAM Tool | ◎ | ◎ |
| LAM | EOS EFEM Controller | LAM Tool | ◎ | |
| LAM | Gammar controller | LAM Gamma Tool | ◎ | |
| LAM | Gammar Arm | LAM Gamma Tool | ◎ | |
| Mattson | Mattson Mapping Arm | ◎ | ||
| Trust | Trust Controller | NVLS_CVD | ◎ | |
| LAM | AHM LTM assy | NVLS_CVD | ◎ | ◎ |
| LAM | LTM Type 2 | NVLS_CVD | ◎ | ◎ |
| Rorze | 700 | AMAT_CMP Mirror | ◎ | ◎ |
| Rorze | Controller | AMAT, Ebara | ◎ | |
| Rorze | 701 | Ebara_CMP EPO-113 | ◎ | ◎ |
| Rorze | 711 | ◎ | ◎ | |
| Rorze | 713 | Mattson RTP 3000 | ◎ | ◎ |
| Rorze | 717 | Mattson RTP 6000 | ◎ | ◎ |
| Rorze | 721 | AMAT Slimcell | ◎ | ◎ |
| Rorze | 751 | ◎ | ◎ | |
| Rorze | RR717 | ◎ | ◎ | |
| Rorze | 757 | TEL | ◎ | ◎ |
| Genmark | GB4P | ◎ | ||
| Genmark | GB4 | ASM A400 | ◎ | ◎ |
| Genmark | GB4S | ASM A400S | ◎ | ◎ |
| Genmark | GB7 | Suss Coater | ||
| Genmark | GB7S | |||
| Genmark | GB8 | Ultratech Stepper, Rudolph, ASM | ||
| Genmark | Traversers | |||
| Sankyo | SR8232 | PSK Supra | ◎ | ◎ |
| Sankyo | SR8250 | ◎ | ◎ | |
| Sankyo Controller | SC3150 | Lam | ◎ | |
| Sankyo Controller | SC5000 | ◎ | ||
| Sankyo | 7150 | ASML Load | ◎ | ◎ |
| Sankyo | SR8240 | PSK Supra, Lam | ◎ | ◎ |
| ASML | MK3 DFA | ASML_Litho | ◎ | ◎ |
| ASML | Load port (UP Type) | ASML_Scanner | ◎ | ◎ |
| ASML | Load port (Down Type) | ASML_Scanner | ◎ | |
| ASML | MK3 Arm | ASML_Scanner | ◎ | ◎ |
| ASML | TSU Motor | ASML_Scanner | ◎ | ◎ |
| ASML | TSU Aligner | ASML_Scanner | ◎ | ◎ |
| ASML | Balance Mass Encoder | ASML_Scanner | ◎ | ◎ |
| ASML | CCU | ASML_Scanner | ◎ | ◎ |
| ASML | Chuck Park Lock | ASML_Scanner | ◎ | ◎ |
| ASML | Open X-Beam | ASML_Scanner | ◎ | ◎ |
| ASML | Drift Motor | ASML_Scanner | ◎ | ◎ |
| ASML | MK5 35XT Scara | ASML_Scanner | ◎ | ◎ |
| ASML | WH Double Folder Robot | ◎ | ◎ | |
| SHINKO old model SBX92101286-2 | TeliusSP | ◎ | ◎ | |
| SHINKO New model | TeliusSP | ◎ | ◎ | |
| SHINKO old model Contlr | TeliusSP | ◎ | ||
| SHINKO new model Contlr | TeliusSP | ◎ | ||
| TAZMO | TAZMO Vacuum robot | ◎ | ◎ | |
| SANKYO | SANKYO Wafer transfer robot | SR8602-0002AAR | ◎ | ◎ |
| TEL Vigus M3 VTM | ◎ | ◎ | ||
| TEL Vigus M2 Cont. | ◎ | |||
| TEL Leaga Robot | ◎ | ◎ | ||
| TEL Arm Lock | ◎ | ◎ | ||
| Moog Robot | ◎ | ◎ | ||
| Milara /Mirro | ◎ | ◎ | ||
| Tazmo Robot TDAIE | Tazmo Transfer unit | ◎ | ◎ | |
| Tazmo Aligner MA-ABP | ◎ | ◎ | ||
| Tazmo Controller IC-Controller | ◎ | |||
| Hirata AR-WL180CL-3 | Ebara CMP 300S2 | ◎ | ◎ | |
| Hirata AR-W180CL-3-S-300-D2 | DNS | ◎ | ◎ | |
| Hirata controller 300S2 | DNS | ◎ | ||
| Hirata Z 3-C Arm | ◎ | ◎ | ||
| Hitachi Foup Arm | ◎ | ◎ | ||
| Aitec Robot AR-WV300 | Panasonic | ◎ | ◎ | |
| Aitec Controller AI-2500A | Panasonic | ◎ | ||
| Semitool New 610T0380 | Semitool | ◎ | ◎ | |
| Semitool Old 610T | Semitool | ◎ | ◎ | |
| ADE 351-0711 | ◎ | ◎ | ||
| ADE Contlr 351 | ◎ | |||
| JEL GHR/GTHR/DTVHR | ASM XP-4 | ◎ | ◎ | |
| JEL Signa7 | Hitachi | ◎ | ◎ | |
| JEL Controller C4410 | ◎ | |||
| MECS APR800 | Canon | |||
| MECS UTC1000 | Walking Janson 999 | |||
| MECS UTC820Z | Nissin, Hitachi CD | |||
| MECS UTC800、801P | Nissin, Walking Janson 999 | ◎ | ◎ | |
| MECS UTC800、801P Contlr | Nissin, Walking Janson 1000 | ◎ | ||
| MECS UTX1000 Series | Nissin, Hitachi ASM | |||
| MECS UTW3400 | Canon | |||
| MECS UTW3100P | Canon | |||
| MECS OF250 Controller | ASM Eagle 10 | ◎ | ||
| MECS Aligner OF250 | ASM Eagle 10 | ◎ | ◎ | |
| MECS Aligner OFH100 | ASM Eagle 10 | |||
| Dainippon | Shibuara | ◎ | ◎ | |
| Daihen SPR956 | Ulvac, AKT | ◎ | ◎ | |
| Daihen SPR955 | ◎ | ◎ | ||
| Daihen SPR951 | AKT | ◎ | ◎ | |
| Daihen SPR907 | ◎ | ◎ | ||
| Daihen SPR906 | DNS | ◎ | ◎ | |
| Daihen SPR903 | DNS | ◎ | ◎ | |
| Daihen SPR902 | ◎ | ◎ | ||
| Daihen SPR8501 | ◎ | ◎ | ||
| Daihen SPR8101 | ◎ | ◎ | ||
| Daihen SPR811S | ◎ | ◎ | ||
| Daihen SPR811 | Ulvac | ◎ | ◎ | |
| Daihen SPR812 | Ulvac | ◎ | ◎ | |
| Daihen SPR809 | Ulvac | ◎ | ◎ | |
| Daihen | SPR807 | Ulvac | ◎ | ◎ |
| Daihen | SPR806S | ◎ | ◎ | |
| Daihen | SPR806 | Ulvac | ◎ | ◎ |
| Daihen | SPR805 | ◎ | ◎ | |
| Daihen | SPR802 | Ulvac | ◎ | ◎ |
| TEL | TEL Track Lithius Robot | ◎ | ◎ |
All repair following our standard repair process steps to make sure 100% quality.
Incoming Inspection Report will be provided within 3 days from incoming date
If there is any specific event during repair process, SMG team will officially report without delay
Incoming Inspection Report will be provided within 3 days from incoming date
If there is any specific event during repair process, SMG team will officially report without delay
AMAT P-5000 Robot Repair Detail

This brief Scope of Work (SOW) delineates the tasks required for the refurbishment and revision of the P5000 Assy Robot. The primary goal is to ensure the optimal performance and prolonged lifespan of the equipment.
1. Symptom Diagnosis Identify and diagnose any operational issues or malfunctions.
2. TASK LIST:
2.1. Revision and Replacement of +30 components
- Rotation belt replacement
- Rotation and Encoder Motor Replacement
- Extension Step. Motor & Encoder replacement
- Extension Belt Replacement
- Rotation Winder Spool Replacement
- Extension Winder Spool Replacement
3. Verification:
3.1. Inspection
3.2. Testing
4. Cleaning
3. Documentation
4. Compliance
1. Symptom Diagnosis Identify and diagnose any operational issues or malfunctions.
2. TASK LIST:
2.1. Revision and Replacement of +30 components
- Rotation belt replacement
- Rotation and Encoder Motor Replacement
- Extension Step. Motor & Encoder replacement
- Extension Belt Replacement
- Rotation Winder Spool Replacement
- Extension Winder Spool Replacement
3. Verification:
3.1. Inspection
3.2. Testing
4. Cleaning
3. Documentation
4. Compliance
Motor HUB HP HP+ HDP

This brief Scope of Work (SOW) outlines the tasks to be undertaken for the maintenance and revision of ENDURA / CENTURA MOTOR HUB HP HP+ HDP robotic systems. The objective is to ensure optimal performance and longevity of the equipment.
1. TASK LIST:
1.1. Revision of Robot Pivot Wrist
1.2. Revision of Robot Frog
1.3. Revision of Robot Hub
2. VERIFICATION:
2.1. Inspection:
2.2. Testing:
3. Documentation
4. Compliance
1. TASK LIST:
1.1. Revision of Robot Pivot Wrist
1.2. Revision of Robot Frog
1.3. Revision of Robot Hub
2. VERIFICATION:
2.1. Inspection:
2.2. Testing:
3. Documentation
4. Compliance
VXP Robot Repair Detail

This brief Scope of Work (SOW) outlines the tasks to be undertaken for the maintenance and revision of VXP Robot Repair Detail robotic systems. The objective is to ensure optimal performance and longevity of the equipment.
1. TASK LIST:
1.1. Upper Motor Repair/Replacement
1.2. Lower Motor Repair/Replacement
1.3. Encoder Repair - Magnet - Bearing and Etc.
2. VERIFICATION:
2.1. Inspection:
2.2. Testing:
3. Documentation
4. Compliance
1. TASK LIST:
1.1. Upper Motor Repair/Replacement
1.2. Lower Motor Repair/Replacement
1.3. Encoder Repair - Magnet - Bearing and Etc.
2. VERIFICATION:
2.1. Inspection:
2.2. Testing:
3. Documentation
4. Compliance
SMG Robot Inspection and Test Kit
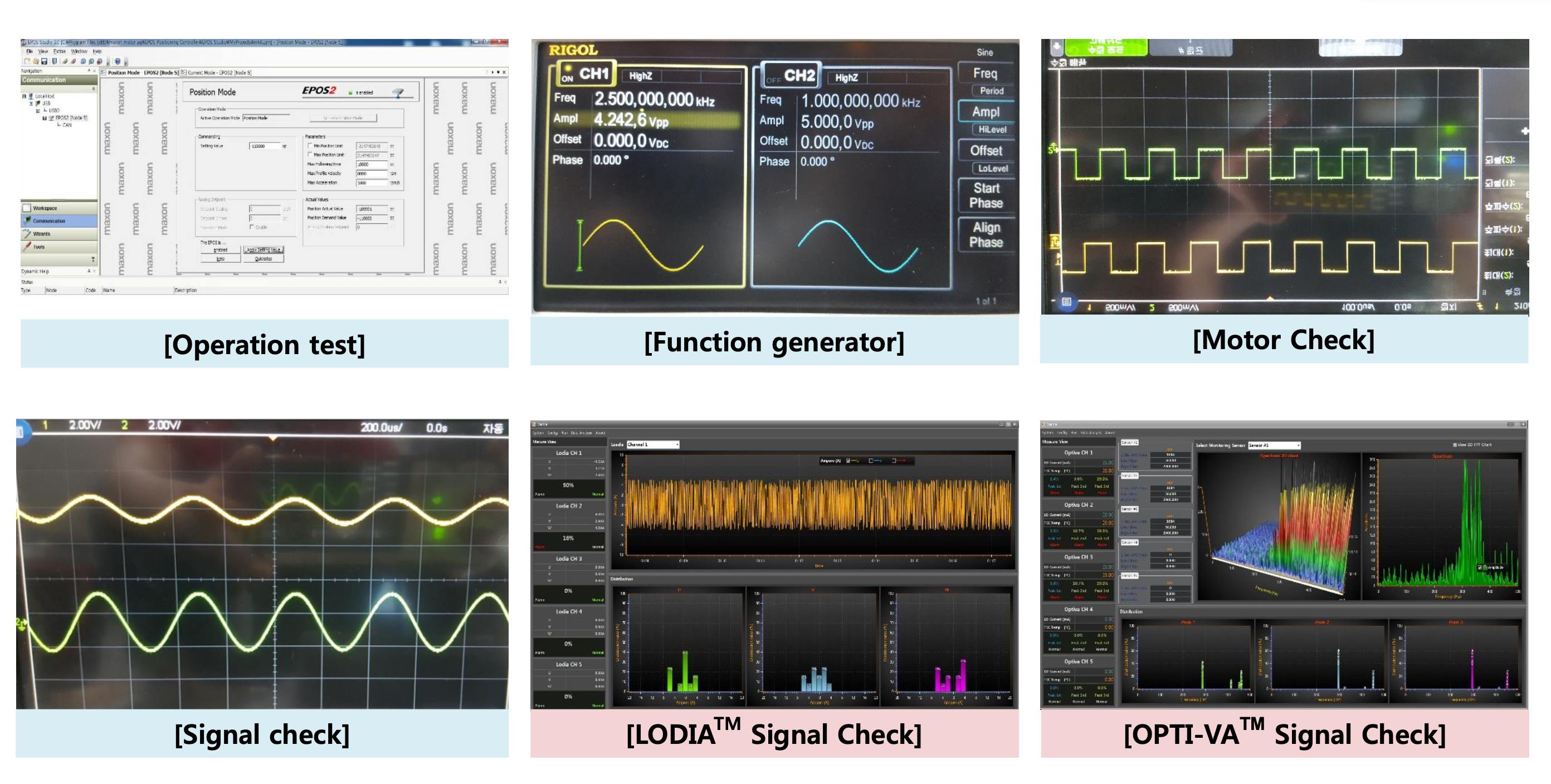
◈ OPTI-VA & LODIA is a condition monitoring system
◈ SMG developed own S/W based on our technical experience
◈ We doing test to see overall condition for every robot repair
◈ SMG developed own S/W based on our technical experience
◈ We doing test to see overall condition for every robot repair

Packing
1. Packing
- To provide perfect protection for our customer’s valuable property
- Prevent any damage can caused by external impact while its forwarding
2. Packing method
- Using ‘Foam In Place’ packing system to eliminate any empty space which can cause vibration and damage
- Provide better cushion than previous packing method
- To provide perfect protection for our customer’s valuable property
- Prevent any damage can caused by external impact while its forwarding
2. Packing method
- Using ‘Foam In Place’ packing system to eliminate any empty space which can cause vibration and damage
- Provide better cushion than previous packing method
◆ Terms and Conditions:
1. Delivery terms: 6~8 weeks after PO & product incoming date
2. Payment terms: T/T 30 days after delivery
3. Warranty: 6 month after installation date for repair
4. Validity: 2 years from quotation date
1. Delivery terms: 6~8 weeks after PO & product incoming date
2. Payment terms: T/T 30 days after delivery
3. Warranty: 6 month after installation date for repair
4. Validity: 2 years from quotation date
Request more Informations
Send a request our Team will contact You in 24 hours.